05 - Closed Loop Systems
Completion requirements
5. Representation of Feedback Control System
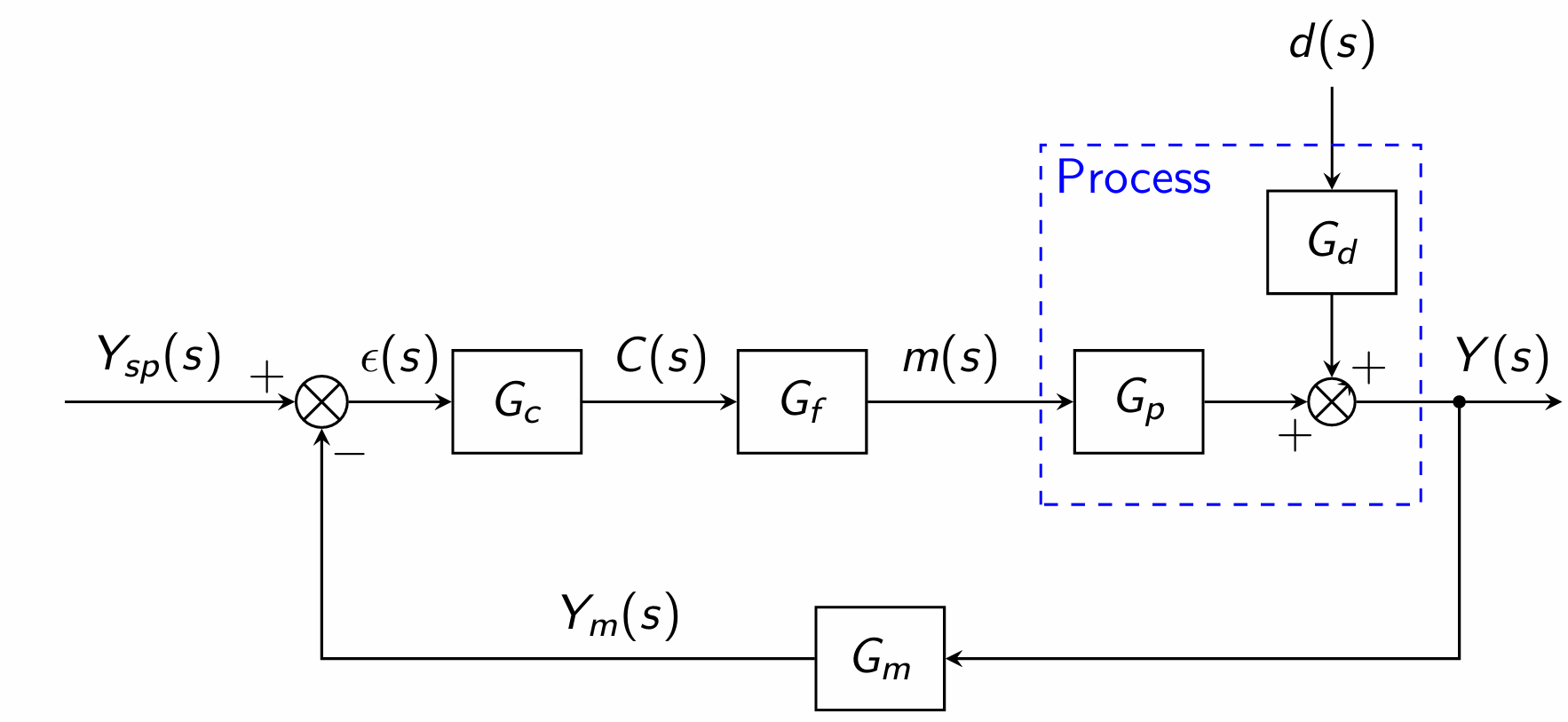
\(m\) - manipulated variable; \(d\) - disturbance. \[Y(s) = \frac{G_pG_fG_c}{1+G_pG_fG_cG_m}Y_{sp}(s) + \frac{G_d}{1+G_pG_fG_cG_m}d(s)\]