06 - Closed Loop Response
Completion requirements
4. Effect of Proportional Control - Unit Step Change in Setpoint
\[\begin{aligned} \text{Setpoint change } &\Longrightarrow \text{servo problem} \\ \text{Load change } &\Longrightarrow \text{regulator problem} \end{aligned}\] For the servo problem, \(Y_{sp}=1/s\), and \(d(s)=0\). Hence the response becomes, \[Y(s) = \frac{K_p'}{\tau_p's+1}\frac{1}{s}\] Taking inverse Laplace transform, we get \[Y(t) = K_p'(1-e^{-t/\tau_p'})\]
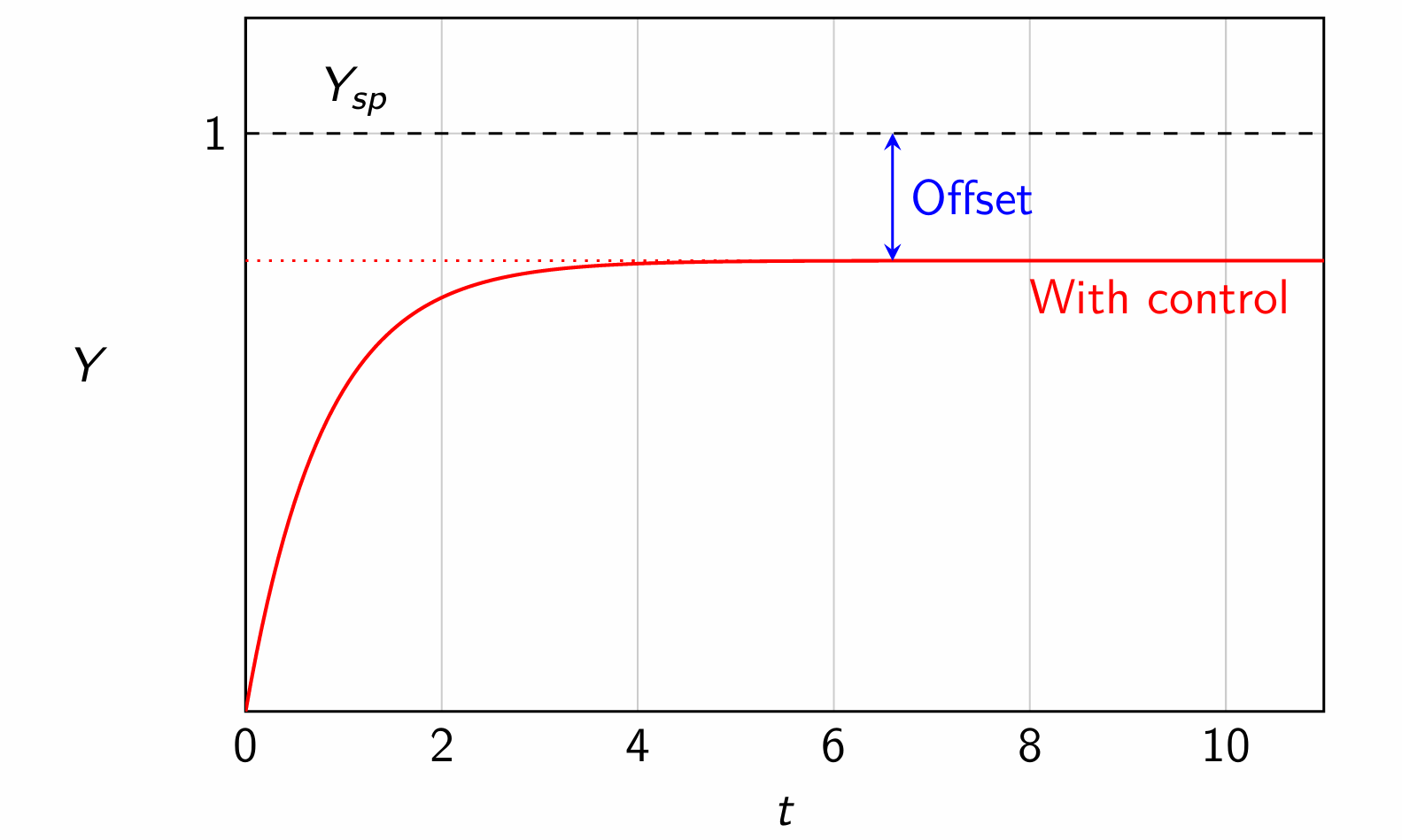
Offset is the characteristic effect of proportional control. Offset can be reduced by increasing the controller gain.