07 - PID Controller
Completion requirements
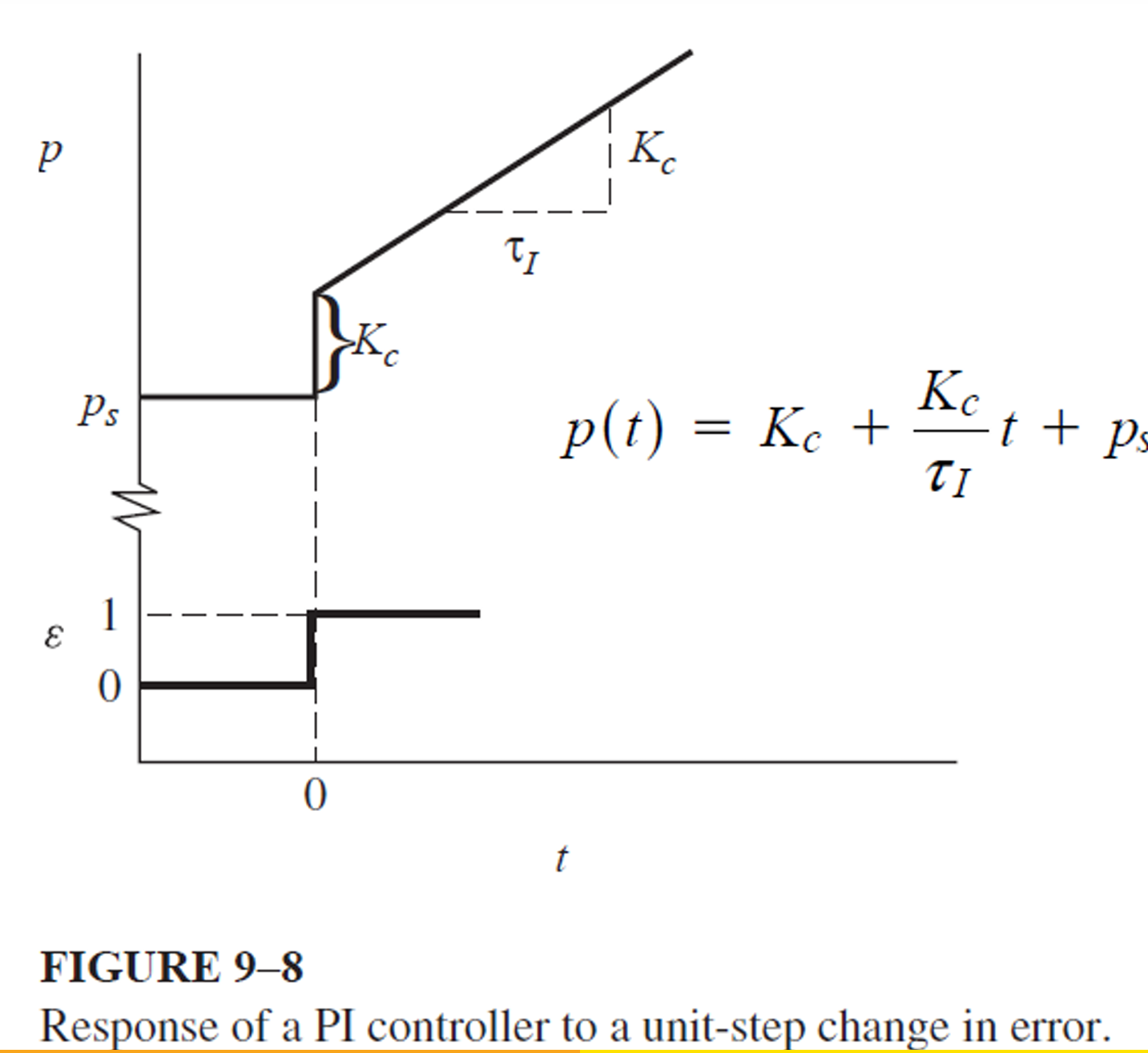
4. Proportional-Integral Controller (PI Controller)
\[c(t) = K_c\epsilon(t) + K_c\tau_I\int_0^t\epsilon(t)\; dt + c_s\] Taking Laplace transform for the deviation variable \(C(t)\), we get \[G_c = \frac{C(s)}{\epsilon(s)} = K_c\left(1+\frac{1}{\tau_Is}\right)\] \(\tau_I\) is the integral time constant or reset time in minutes. The reset time is adjustable parameter, and is sometimes referred to as minutes per repeat. Usually it varies in the range: \[0.1 \le \tau_I \le 50 \text{ min}\] The term \(1/\tau_I\) (minutes per repeat) is known as reset rate.