10 - Dead Time
2. FOPDT
The dynamic response of self-regulating processes can be described reasonably accurately with a simple model consisting of process gain, dead time and lag (time constant). The process gain describes how much the process will respond to a change in controller output, while the dead time and time constant describes how quickly the process will respond.
Systems with order higher than one, can be represented by \[G(s) = \prod_{i=1}^n G_i(s) =\frac{K}{\prod_{i=1}^n(\tau_i s +1)}\]
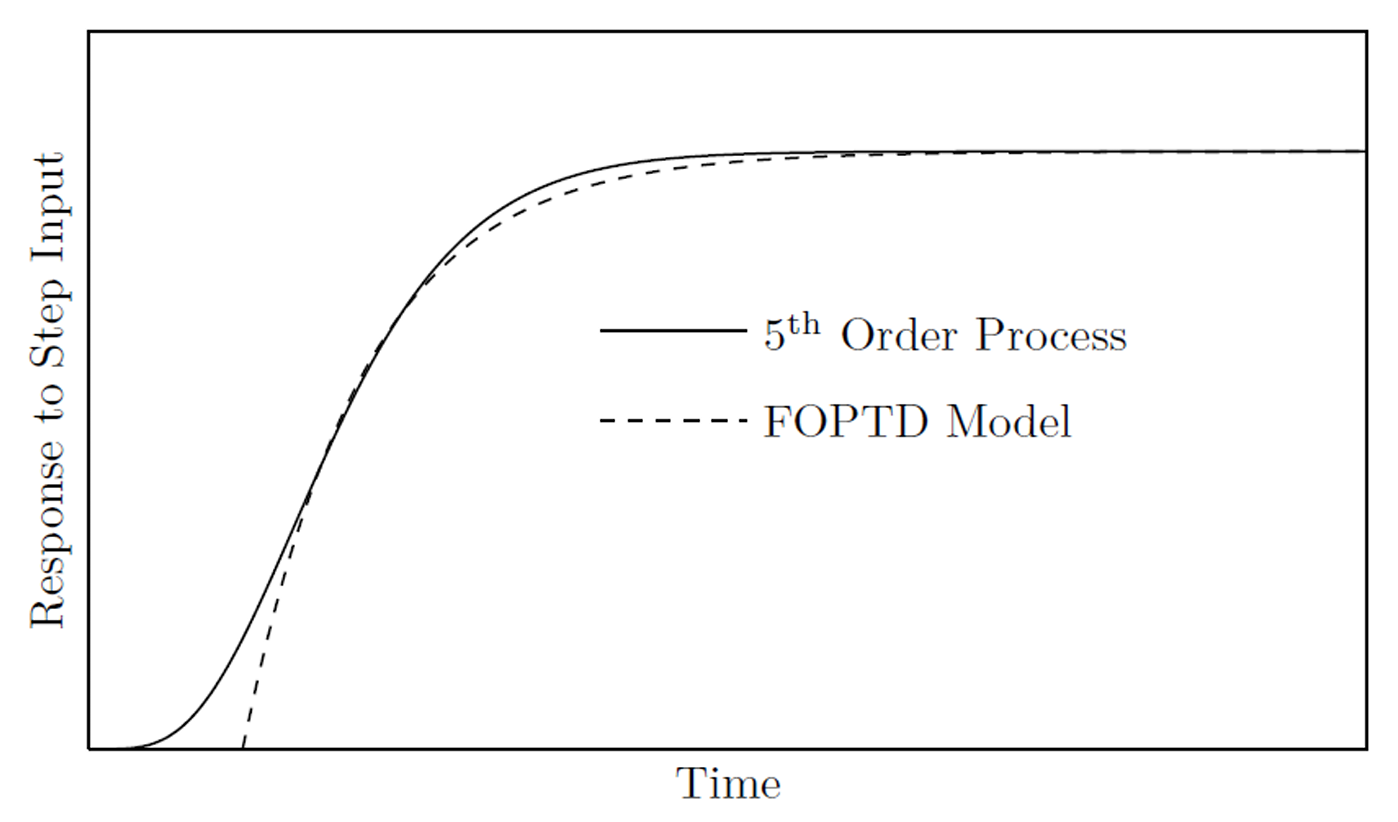
It can be approximated by a first order plus dead time system as \[G(s)=\frac{Ke^{-\tau_d s}}{\tau_1 s+1}\] where \(\tau_1\) is the dominant time constant, and, \[\tau_d= \sum_{i=2}^n\tau_i\]
e.g.: \[G(s) = \frac{K}{(5s+1)(3s+1)(0.5s+1)} \approx \frac{K\,e^{-3.5s}}{5s+1}\] Here, \[\begin{aligned} \tau_1&=5 \quad (\text{the dominant time constant}) \\ \tau_d&=3+0.5=3.5 \quad (\text{the dead time}) \end{aligned}\]